3D Printer
Introduction
I ended up replacing almost all the stock parts of the printer and adding several modifications of my own, this greatly improved the print quality and more importantly - I had immense fun taking it apart and learning about each component and concept.
How 3D Printing works?
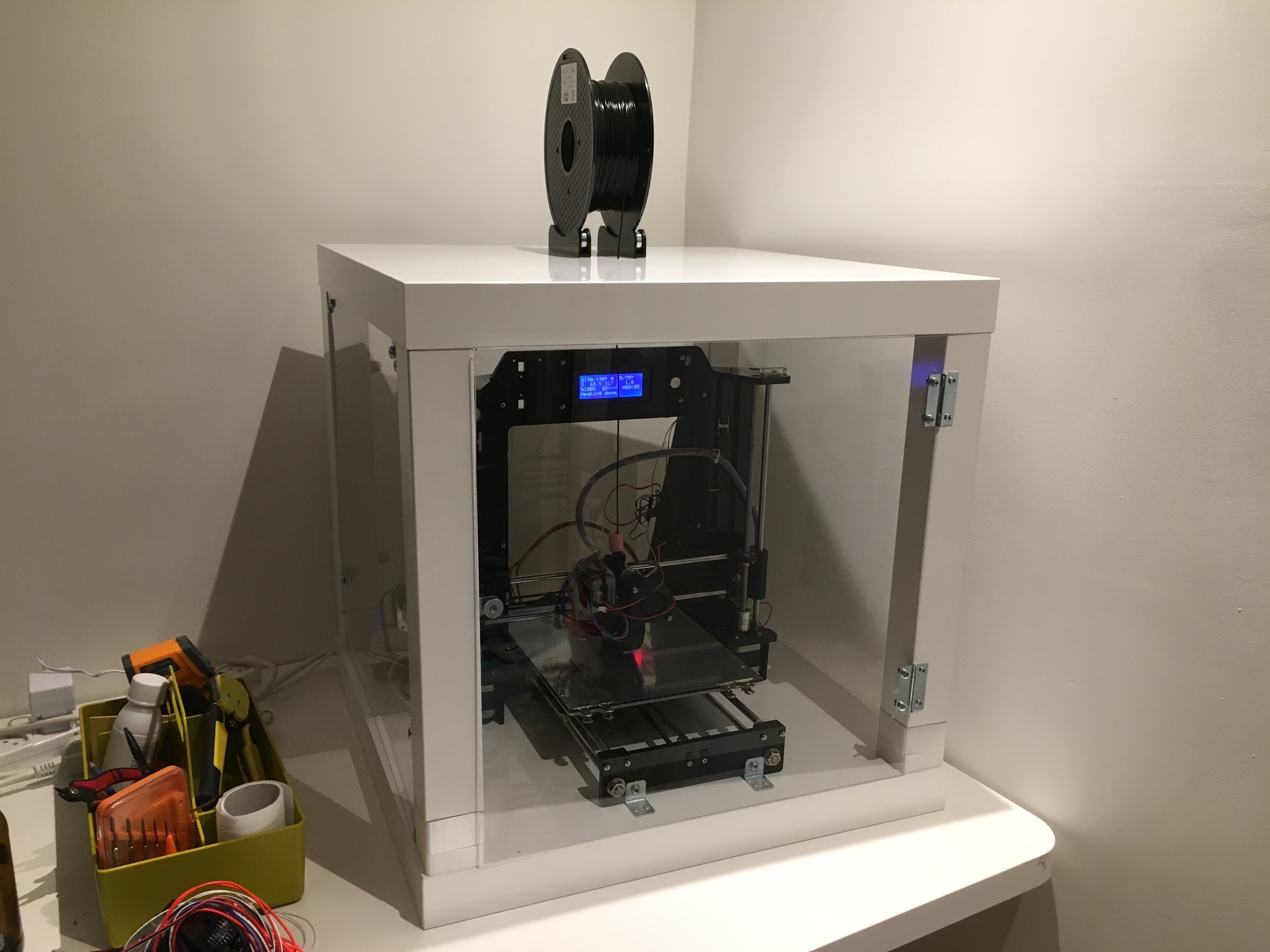
As I noted before the printer I bought is based on Prusa i3, it’s an open-source 3D printer (yes! open-source hardware is a thing). It was designed in 2012 by Josef Průša, and is part of the RepRap project, open-source project to create a self-replicating machine (hence, rep-rap).
The printer works by heating a hot-end with a miniature hole (sizes can vary, mine is 0.4mm) and pushing material (filament) into it, at the same time the hot-end can move on three dimensions - X (left-right), Y (front-back) and Z (up-down). Printing is done layer-by-layer, starting from the bottom of the model upwards. Almost every parameter of the print can be controlled (layer height, layer width, printing speed), although there are certain mechanical limitations for each printer so the value ranges can be limited by that fact.
Hardware Modifications
Over the years I’ve replaced most parts of the printer - bearings, stepper-motors, logic-board, fans… etc’. This is an accurate list (as of 20/04/2020) of the current hardware parts:
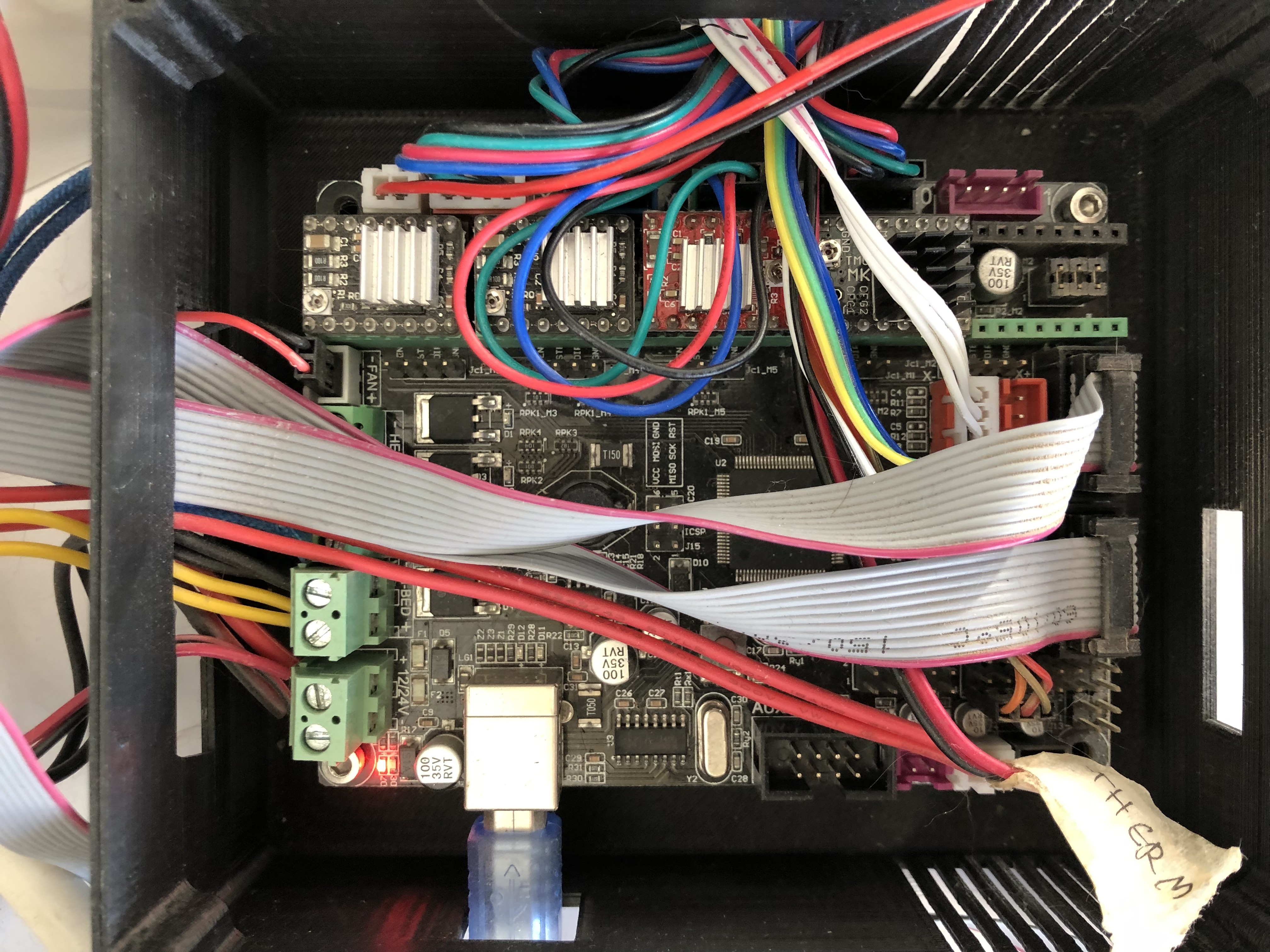
- Logic Board:
- Main Board: MKS Gen-L v1.0
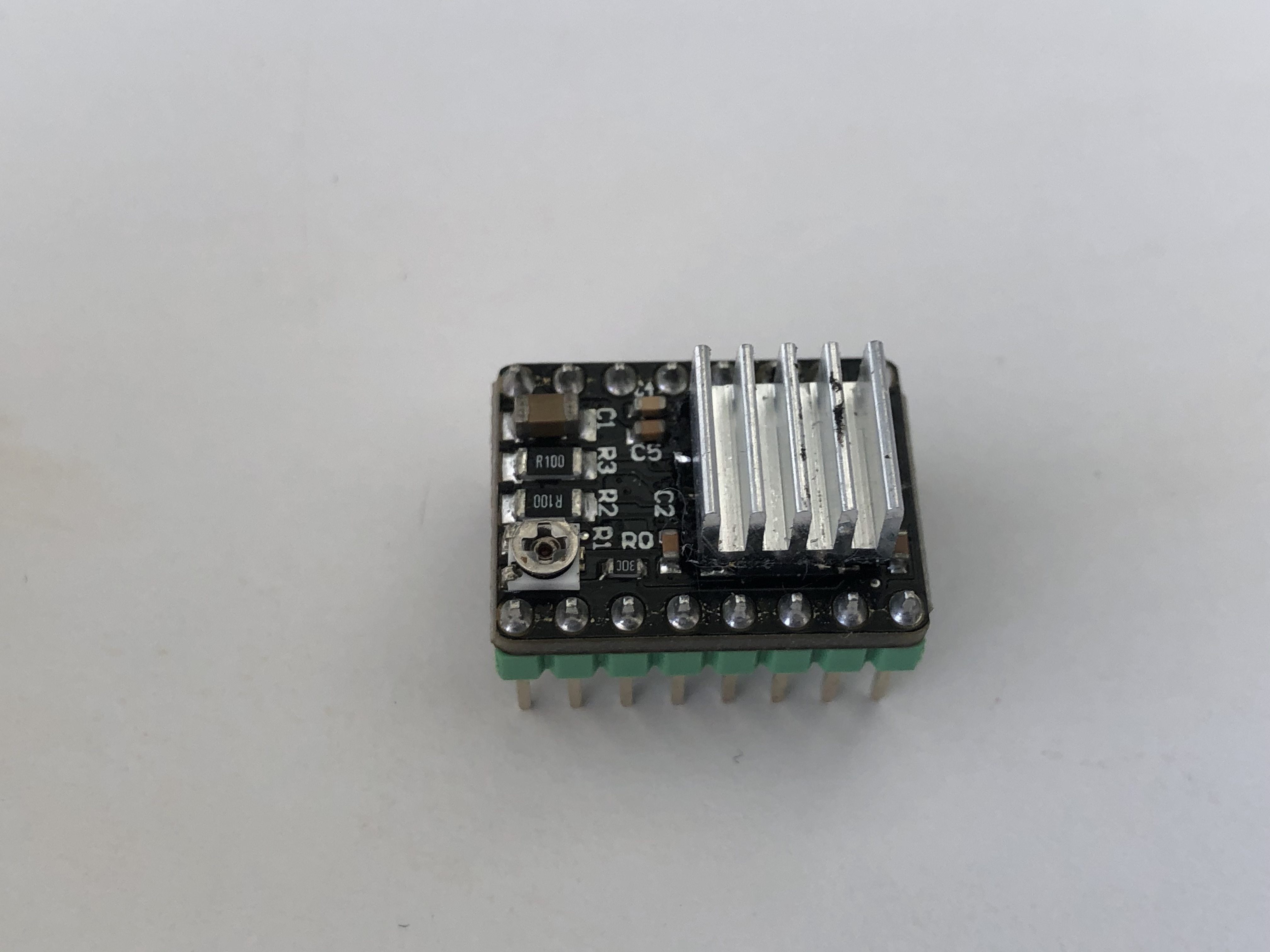
- X, Y & Z Stepper Motor Drivers: MKS DRV8825
- Extruder Stepper Motor Driver: MKS TMC2100
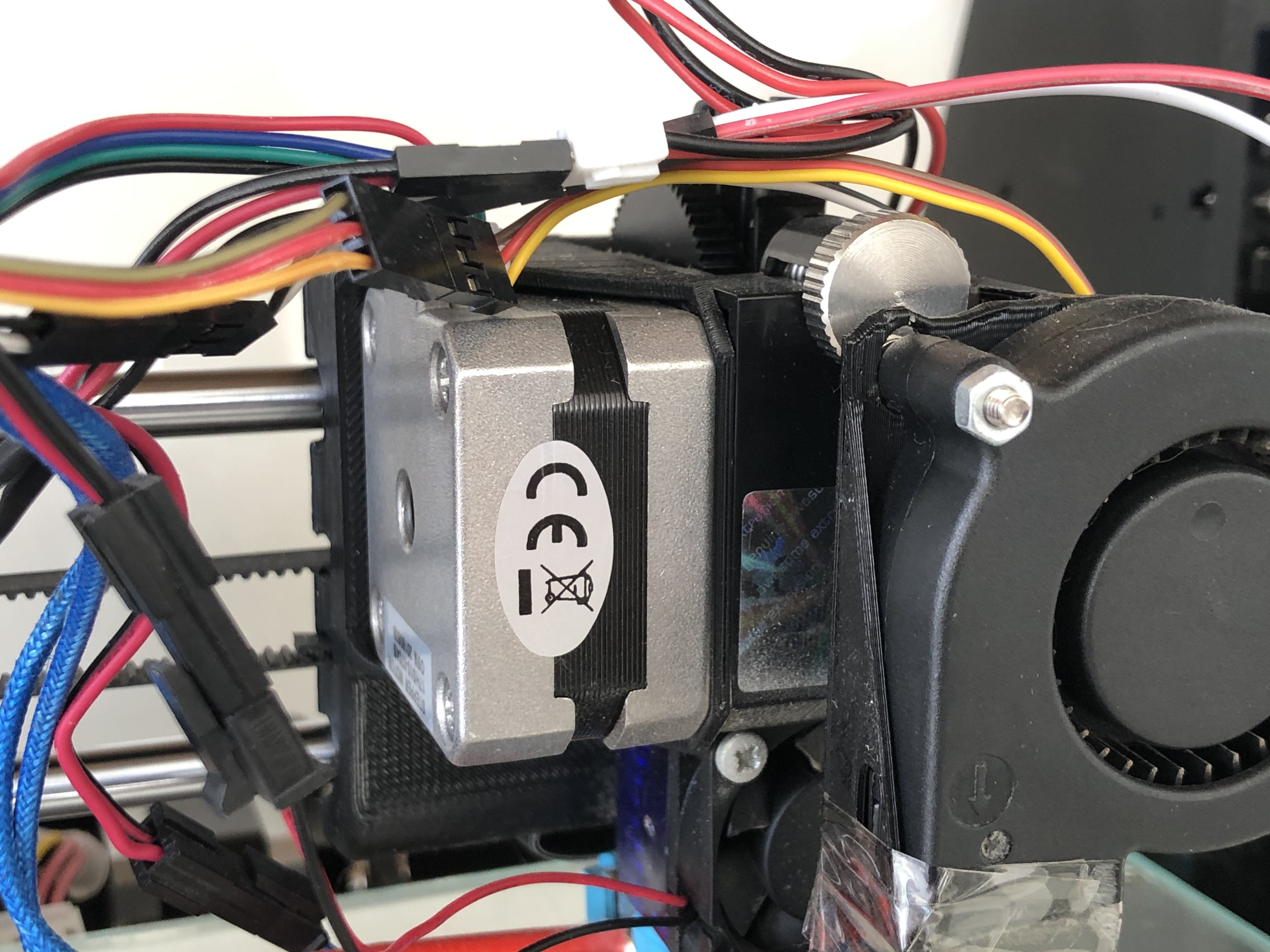
- Motors:
- X, Y & Z: Nema 17 Bipolar 3.3V 1.5A 0.4N.m
- Extruder: Nema 17 Bipolar Step Motor 2.9V 0.7A 18Ncm
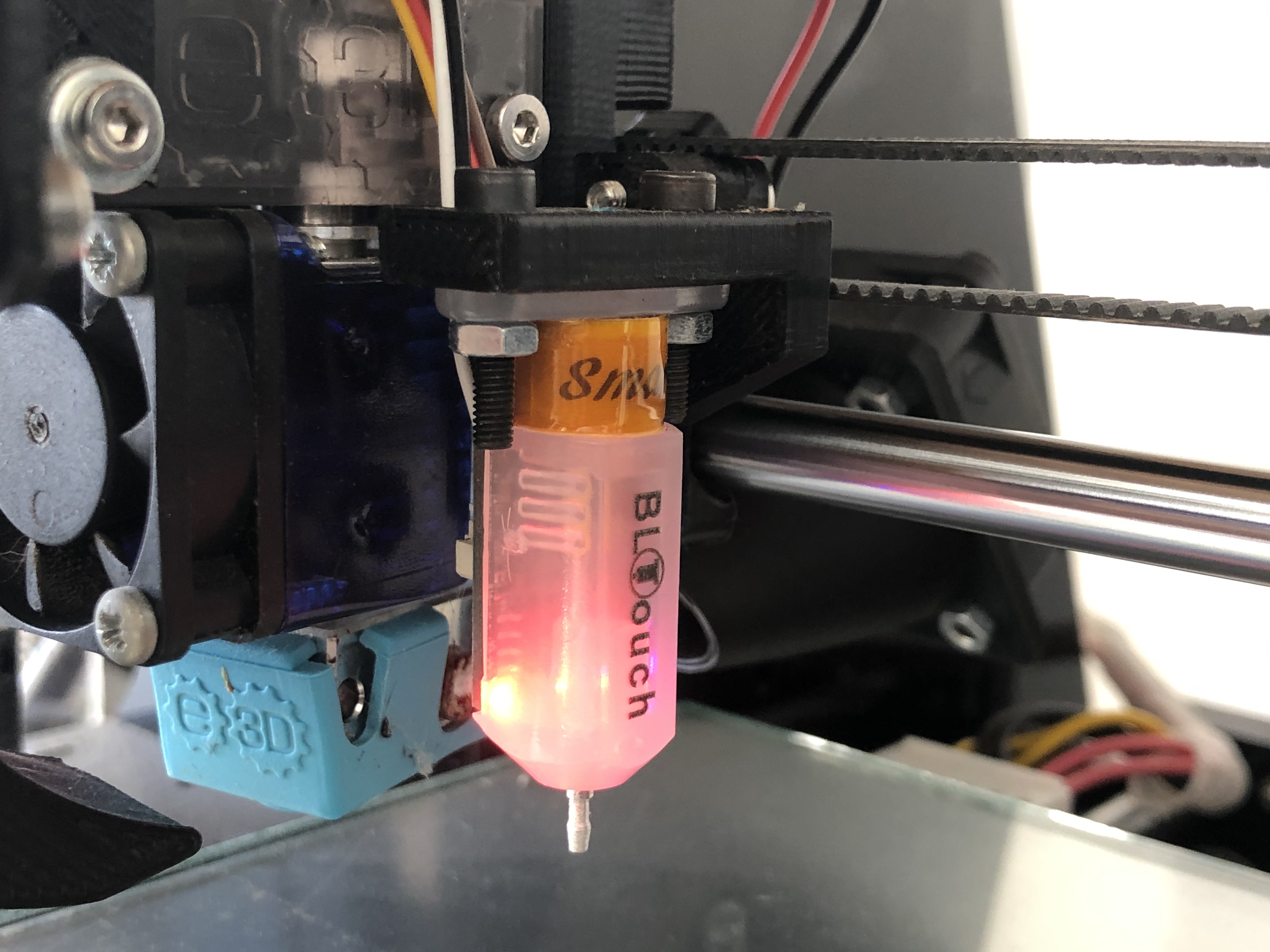
- Hotend & Extruder:
- Nozzle: E3D V6 0.4mm Nozzle
- Extruder: E3D Titan
- Z-Probe: BLTouch
- PSU:
- Unfortunately I don’t remember and I don’t want to take apart the printer to check :)



Firmware
The firmware I use is Marin, it’s an amazing open-source firmware for RepRap printers, it supports an extensive list of boards. The firmware is the orchestrator of the entire printing process, it executes several important processes and a lot of a printer capabilities is defined by the firmware that’s used.
You can find my configuration here.
Gallery